Hello
I am making my first hybrid ROV with a payload of 20 kilograms. I have tested my frame which is look like the attached photo. I made it from composite material. I have tested the frame resistances which can go deeper than 300 meters. The result of the drag test (at 2 knots) is about 35 kilogram in each direction.
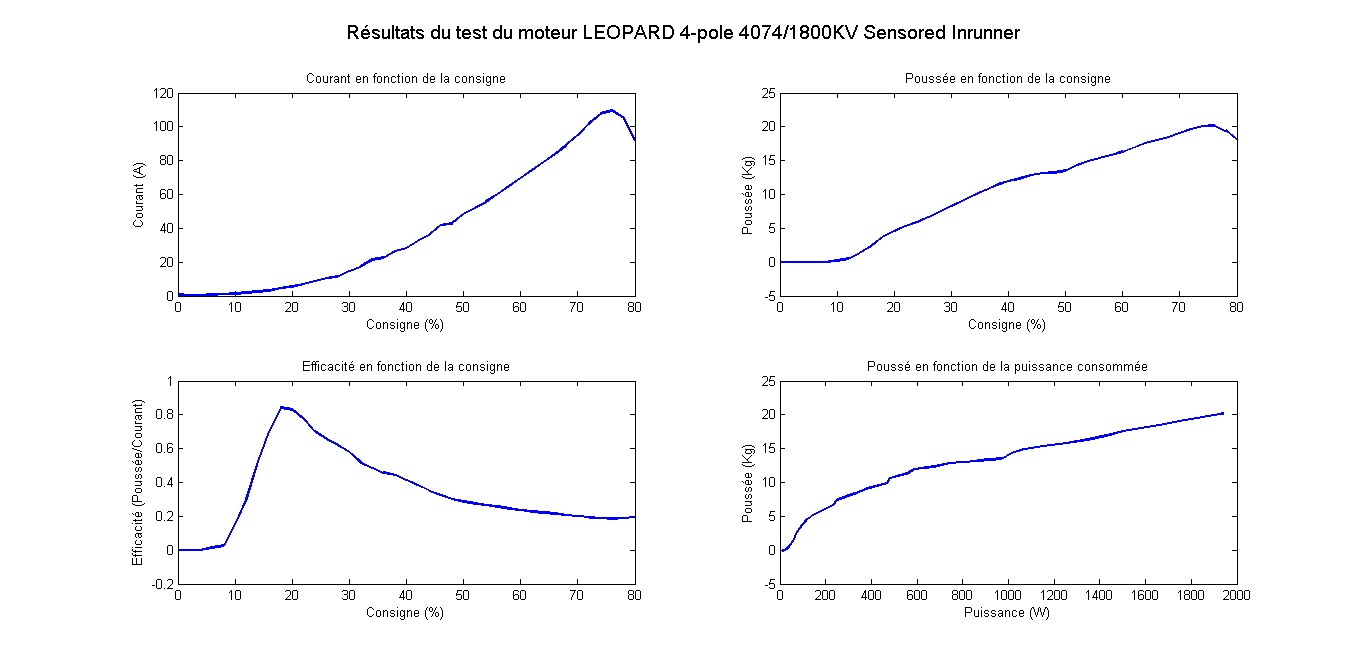
I am designing thrusters for my ROV to make it move correctly. I have tested a 3 blades symmetric kaplan propeller (Diameter:150mm Pitch:130mm with no rake and no skew ) with a couple of motor the first one was an outrunner BLDC motor of alien power (http://alienpowersystem.com/shop/63m…-170kv-3200wa/) and it gave an insufficient results . the thrust didn’t exceeed 10 kilograms when the current is much more than the max current supported by the motor (120A ) and it causes a voltage drop. but the second test was done using the inrunner leopardhobby motor ( http://www.helipal.com/leopard-lbps4…ess-motor.html ) coupled with a gear box (http://www.reisenauer.de/artikeldetails.php5?aid=242) the results of the test are presented on the attached photos with 4 curves.
I have 4 horizontal vectored (45 degrees )and 2 vertical thrusters I should get at least 45kg of thrust in every direction with approximately 2.8 x the thrust one thruster. So that every thruster should be capable to push and pull more than 16 kilograms.
The power supply unit that I am using for my ROV present a limitation on thrusters consumption. So that every thrusters shouldn’t exceed 20 Amp which is not the case of our test.
I should mention that I have a kort nozzle 37 that I have not used yet.
What I am looking for is an advise or a feedback of an experimented ROV designer to make my thruster more effective. Thank you in advance.![]()
.