Home › Forums › ROV › ROV Technical Discussions › TSS440 Noise (Thruster system??)
- This topic has 16 replies, 6 voices, and was last updated 8 years, 3 months ago by
Bob Backlund.
-
AuthorPosts
-
June 22, 2016 at 2:03 am #7315
Saxon Jones
ParticipantGoodmorning to all,
I am currently offshore, looking to carry out pipetracking operations, however I am plagued by what seems to be thruster system related noise;
The setup,
Workclass ROV through moonpool.
Front mounted coils on rams (1.02M from ROV to Coil edge).
SEP and PSU mounted at front away from HPU and grounded (pin2) to sea potential.
System supported by Innova Matrix.
Manips off.
Metalwork bonded.2 x Innova Mux swapped out
3 x TSS440 swapped out.Enviromental checked and clear.
So, We carry out a back ground comp and all is good, coil values at zero. As soon as threre is a thruster (HYD) demand the coil values go through the roof (approx 150uV), so thrusters and related systems are suspect.
The question is what steps can in take??
I would greatly appreciate any help.
Sax
June 23, 2016 at 4:33 am #36585Etienne Demers
ParticipantHello,
Is the bracket supporting the TSS440 coil made of poly?
Does the problem occur the same in and out of the water?
Could your ROV have a ground fault issue? If yes remove the ground from the TSS440 power for troubleshooting.It’s kind of hard troubleshooting an unknown system remotely. So many factors could influence this fault.
Anyway, good luck.
June 23, 2016 at 12:48 pm #36586Anh
ParticipantHi
I have never experienced sensing problem related to thruster before. I would suggest that you do background compensation with thruster’s trims on to see any difference.
I would think that thruster generate acoustics noise and vibration. Acoustics noise won’t affect 440 system but coil frame movement does so make sure you got a rigid frame.
Also how do coil signals look like? If they are fixed values (on single channel or all three channels) then you may have faulty analogue or main boards.
Hope this helps.
June 23, 2016 at 5:51 pm #36587ParticipantHi guys,
Thank you for the replys.
1 Coil mounted using Teledyne suplied acetal
2 Unable to replecate fault on deck, presumed too much background from superstructure in hanger etc.
3 I like the remove ground from TSS idea for faultfinding.!!
4 The BGC fails if using Trim/Thrusters
5 Yes the coil values are approximatly equal across all three coils, but this is the same on 3 x TSS systems.Again, many thanks for your input. It is much appreciated.
Sax
June 23, 2016 at 7:42 pm #36588liddelljohn
Participantwhat ROV are you operating ???
June 23, 2016 at 7:54 pm #36589Participantwhat ROV are you operating ???
Hi LJ,
It is a STS Explorer.
Cheers for the interest, appreciated.
Sax
June 23, 2016 at 8:22 pm #36590ParticipantHi Saxophone
It’s interesting to know that background compensation fails with thruster’s trims on. What are standard sample voltages when it fails? Are they over 1000uV?
Excessive voltages may indicate that too much noise coming from ROV. I would suspect when you use thrusters there will be higher 3 phases current flowing causing noise. There is a issue called eddy current you maybe consider. You can find more info about eddy current below (copied from manual) and on attached photos.
I’m using a rear mounting 440 system fixed to ROV frame with separation about 1m and yet haven’t got any background comp issue with thrusters on or off and also with or without earth connection to TSS bottles.
6.3.7 ROV Induced Noise
In some ROVs, whose metallic frame is bolted together rather than welded, eddy currents can flow through the frame. When the ROV is stationary, i.e. during a background comp, the magnetic fields produced by these eddy currents are static and can be compensated out. Once the vehicle moves, however, the conductivity (and resistance) between the frame joints changes, which changes the magnitude of the eddy currents, thus a different magnetic field is produced. This changing magnetic field is detected by the 440 search coils and is seen as signal shifts (i.e. the background comp level continuously shifts) by the system, which in turn is seen by the user as ‘ false’ targets.
The ROV frame can be viewed as a shortened turn with a variable resistance.
To reduce the effects of ROV induced noise, the user can:
a. Find and remove the source of the eddy currents.
b. Extend the coils further away from the vehicle frame.
c. Electrically bond all the conductive parts of the frame so that a constant current flows through the frame joints.
eddy_current_noise_3_196.jpg 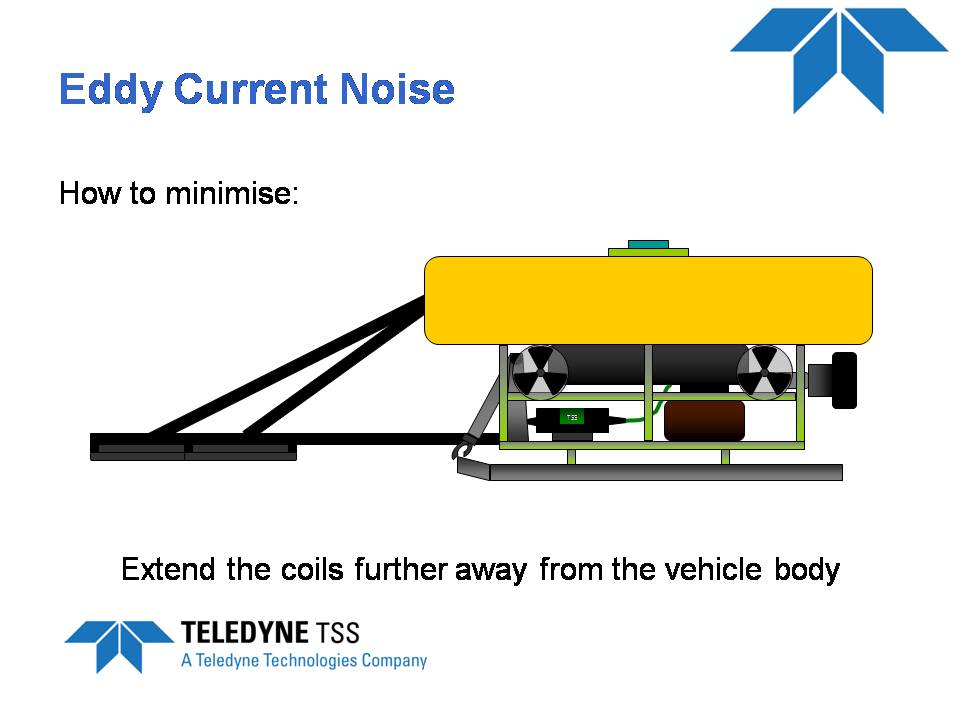
eddy_current_noise_2_140.jpg 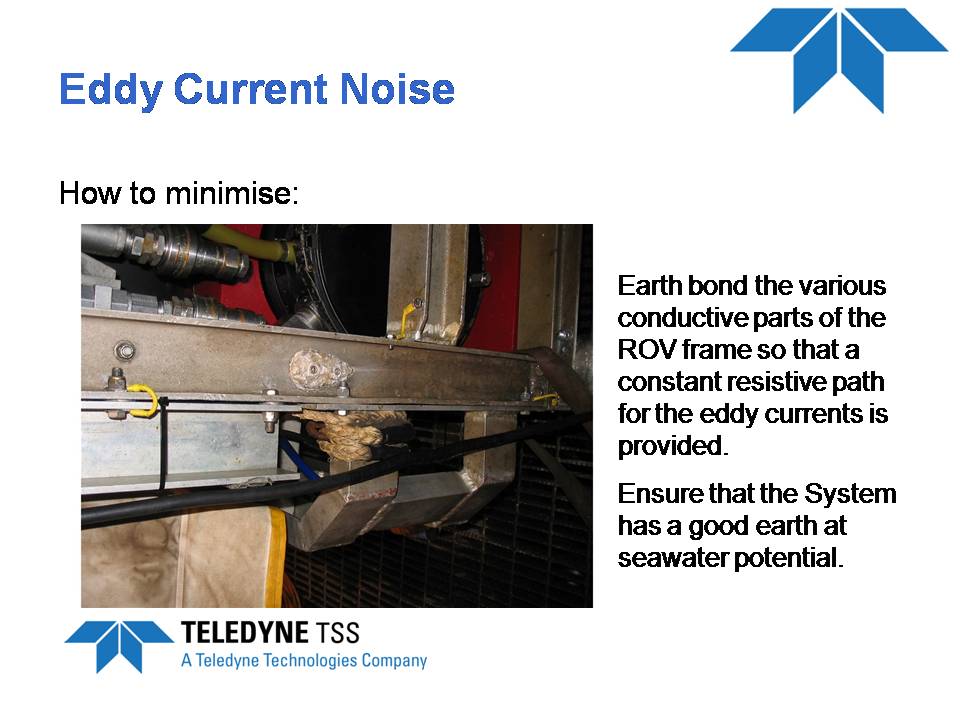
eddy_current_noise_1_924.jpg 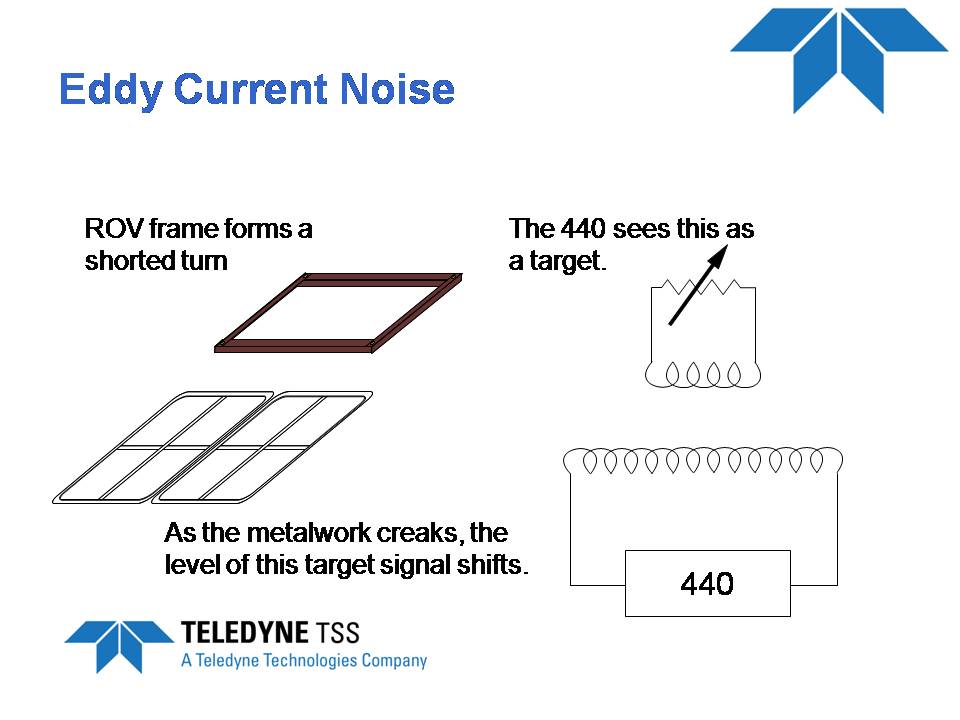 June 23, 2016 at 8:39 pm #36591Participant
June 23, 2016 at 8:39 pm #36591ParticipantHi ANH,
Thank you for you input, appreciated.
The BGC fails not because of signal amplitude, but the range between the values of each channel over 10 samples. Eg > 20 or 50uV dependent on sample.
Thank you for the eddy current information. We have looked over the ROV, and checked resistace between usual components, thrusters, hpu, pods, rams, frame etc for bonding and as far as we have found all is fine.
We even have a Teledyne 440 engineer on board!! But is also stumped.
Again to all reading, I am greatful of your input. Please keep posting.
Sax
June 24, 2016 at 2:46 am #36592john nangle
ParticipantHI,
Are the sensor cables tied seperately and away from any other cables?
If the ROV is in the water and you have the HPU off and command thrusters do you still get the same result?
In otherwords,
Is the interaction because HPU load increases with command ….or is it the actual signals (as small as they are) to servos causing issue
June 24, 2016 at 8:57 am #36593ParticipantHi ROV,
Thanks for the post.
The cables have been routed away from the usual sources of noise, Tether, HPU etc.
I will divide the HPU / Servos next dip, good call.
The coils are currently off at the moment for 48hrs whilst GVI / multibeam is done.
So will have a look then.
Cheers again,
Sax
June 24, 2016 at 11:51 am #36594Participantcould there be any anomaly from the Vessel ?? earthing or ships power ? or any anomaly in the water or seabed debris or iron in water column ??
June 24, 2016 at 12:15 pm #36595ParticipantYour setup seems standard and I do not think it affects your problem.
Did you try removing the ground link?
Did you try another TSS440?
Did you try diving in a different area?
June 25, 2016 at 10:36 am #36596ParticipantHi to all,
Thank you for all you inputs into this problem. Due to operational reasons, other than TSS, we are ending the project. Therefore unable to get to the bottom of the issue.
To answer the last of the questions; yes different areas were used, some where several KM away. 3 x TSS units were used. And yes, there could of been unknown ship supply issues.
Until next time, I thank you all for you invaluable assistance.
Best regards,
Sax
June 25, 2016 at 12:59 pm #36597ParticipantHi,
Would you mind telling us the depth of water and also the approx size of the vessel that was being used
Thanks
June 25, 2016 at 1:30 pm #36598ParticipantROVP,
Sure,
Depth 25-30m
Vessel 70m
Cheers,
Sax
-
AuthorPosts
- You must be logged in to reply to this topic.

